



Deformable ConvNets-可变形卷积学习

可变形卷积是相对于标准卷积来说的,这个概念出自于Hu han团队在2017年发表的一篇论文《Deformable Convolutional Networks》。既然该概念是相对于标准卷积来说的,那么我们就有必要将两种卷积进行对比学习。
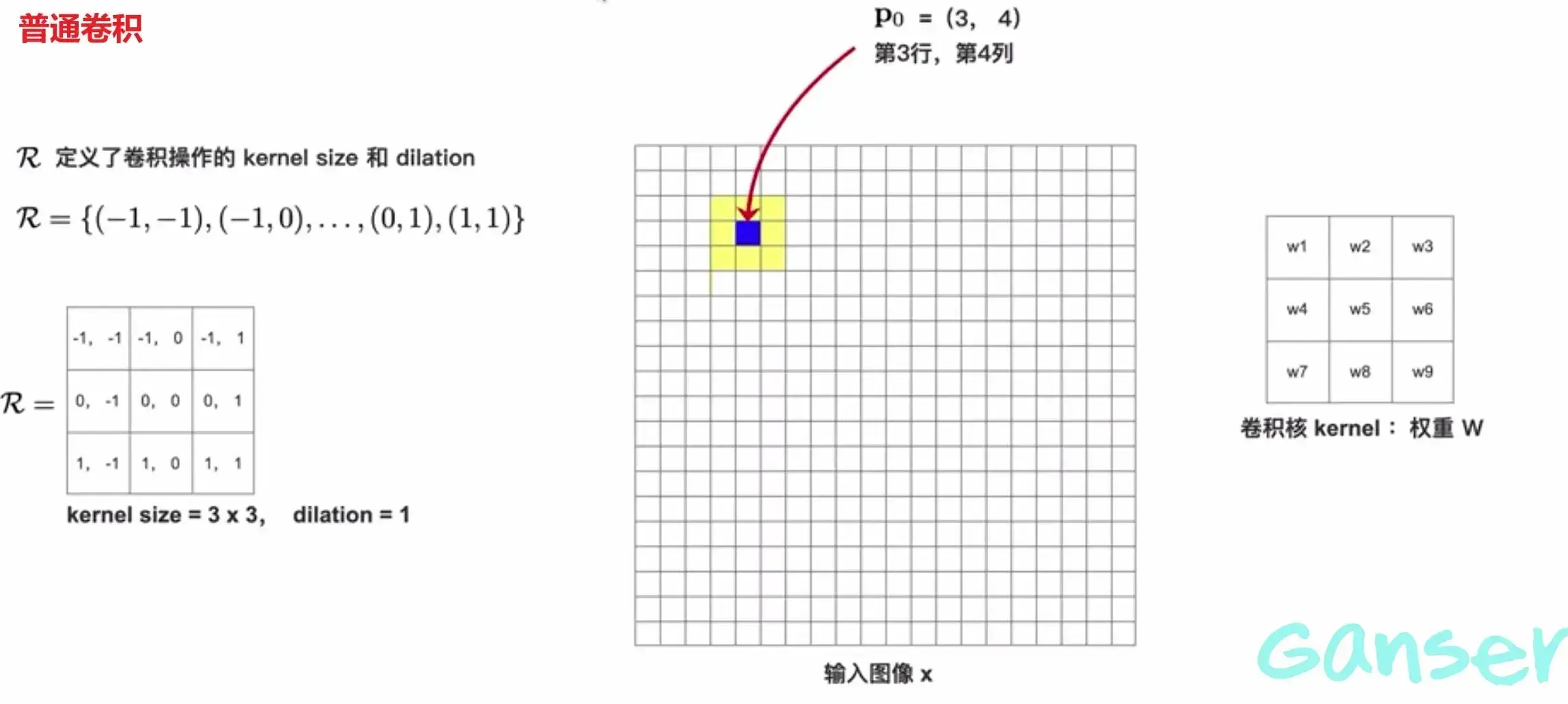
一、标准卷积
首先,对于标准卷积我们可以借用下面的数学表达式理解:
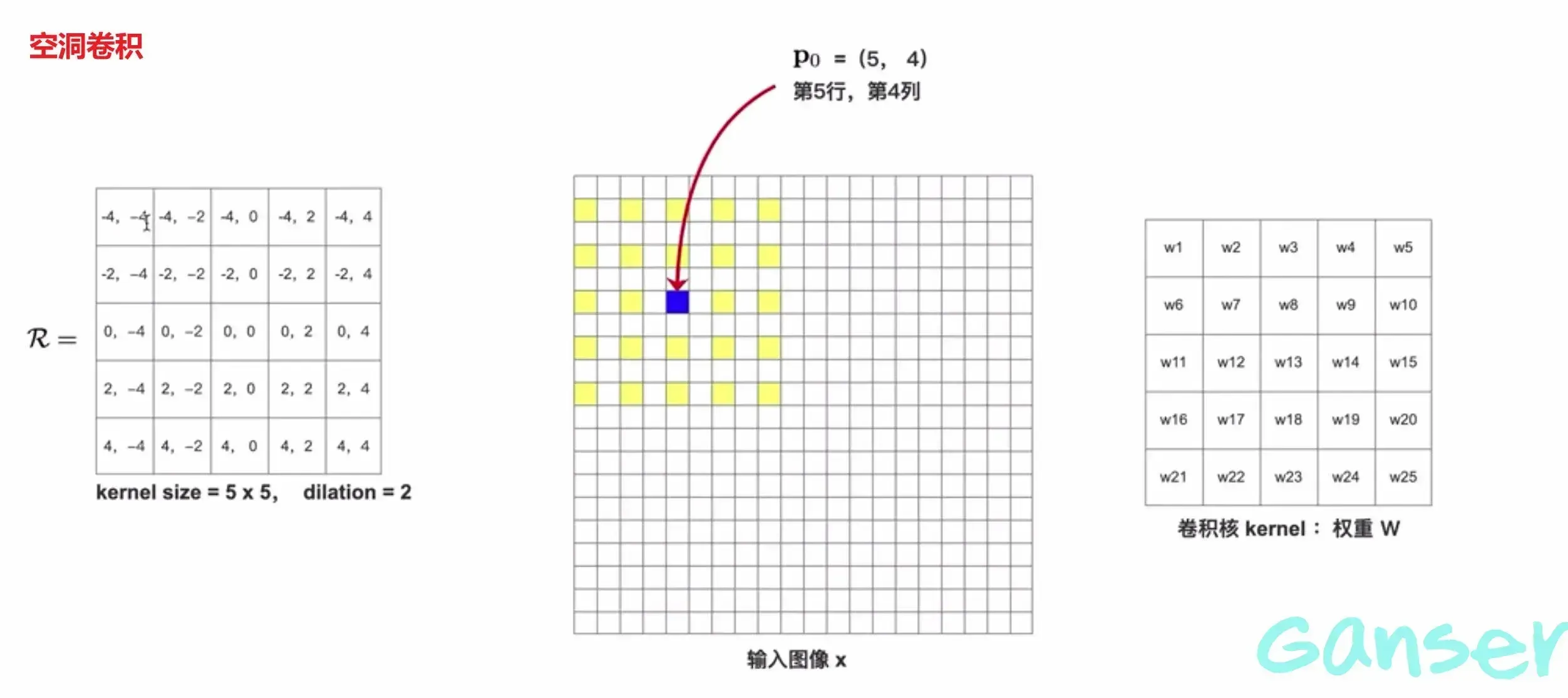
这里代表中心像素的坐标,代表基于窗中的临近元素坐标,它是相对于的,代表像素的像素值,代表卷积权重,是由与共同构成相对位置坐标的矩阵/集合。在这里定义了卷积尺寸和卷积模式(空洞卷积或者普通卷积)。
卷积的运算,即相乘相加,将尺寸为3x3的感受野中的信息通过卷积的运算聚合到map中的一点。
二、可变形卷积
对于可变形卷积我们可以借用下面的数学表达式理解:
注意到可变形卷积是在标准卷积的基础上加上了位置偏移量offset,在论文中指出是学习得到的值,为小数,由图像经过普通卷积计算得到,下面理解该是如何得到的。
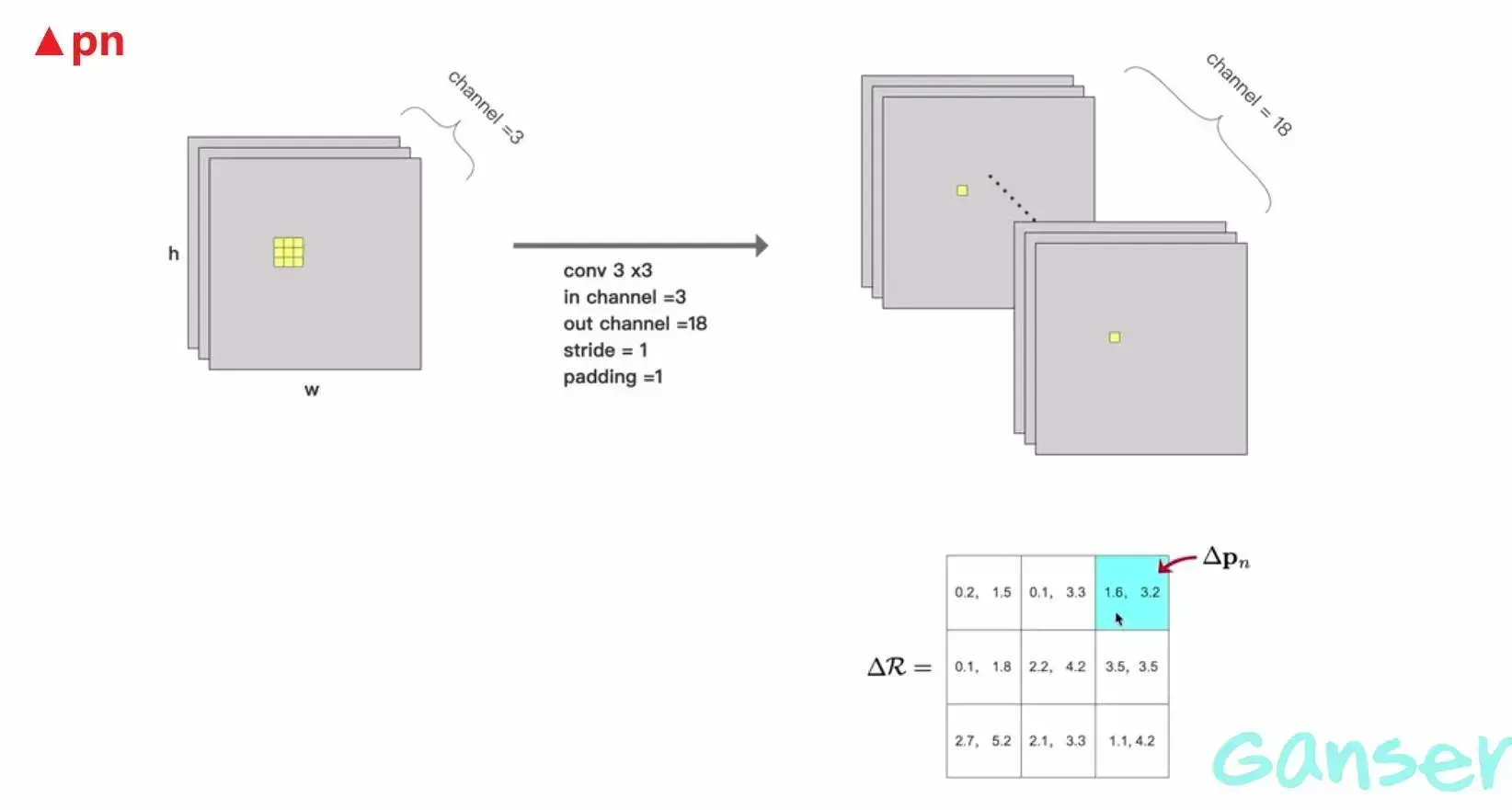
2.1 Offset计算得到
上面指出offset是有普通卷积得到,对于普通卷积的卷积核设置做如下规定:
- in_channel等于输入图像的channel_num
- out_channel等于二倍的kernel_size的平方(这里的kernel_size为可变形卷积的kenel_size)
- stride,padding均有决定
在下图中得到channel等于18的feature map后我们将由尺寸为3x3的感受野经过卷积得到的抽象信息(拥有18个channel)拿出来做reshape得到
2.2 可变形卷积的操作过程
针对以上得到的偏移位移矩阵,用于计算相邻元素的偏移位置,从而得到偏移后的像素值(称之为亚像素点的像素值),使用该像素值与卷积核进行卷积从而得到可变形卷积的结果。
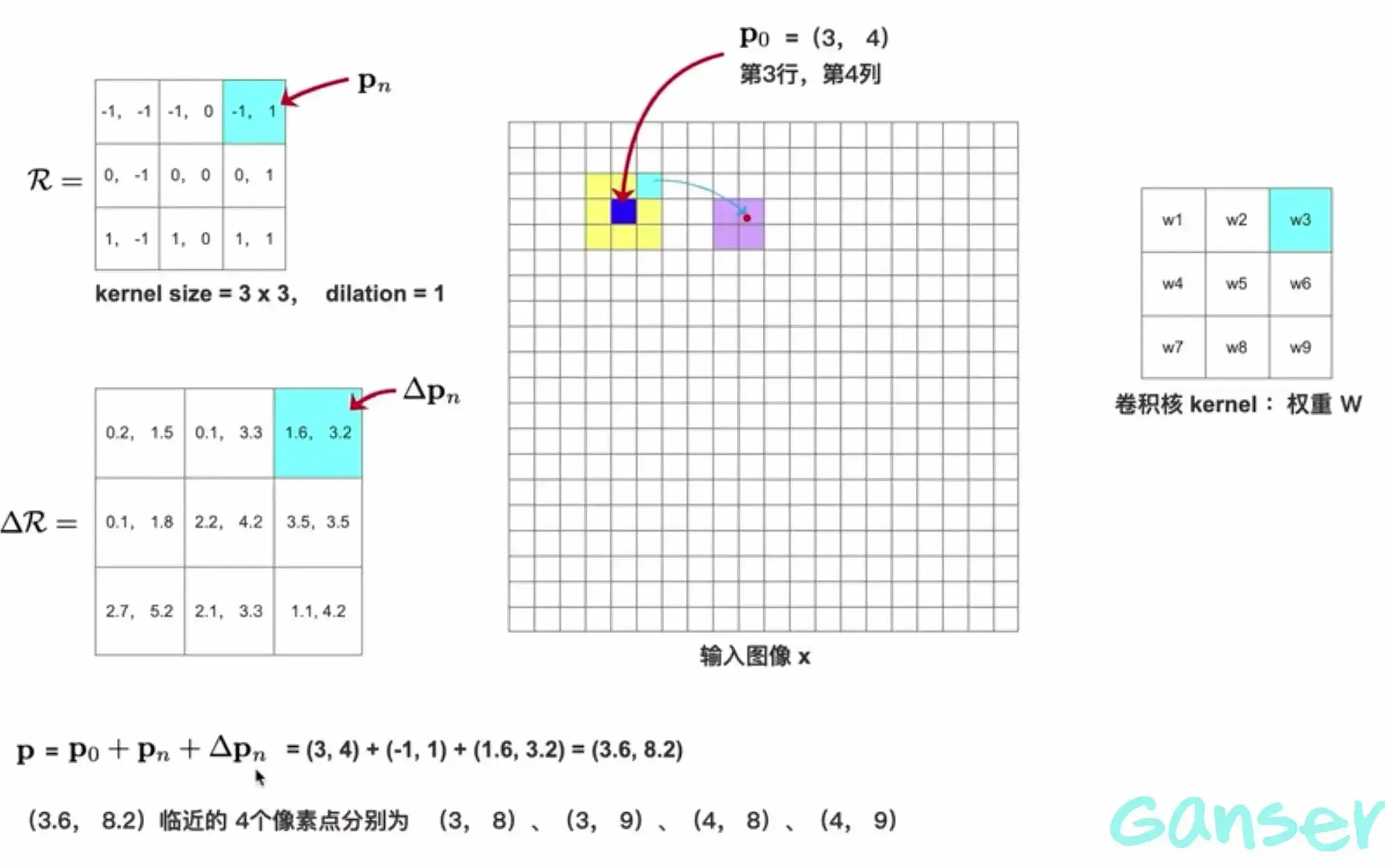
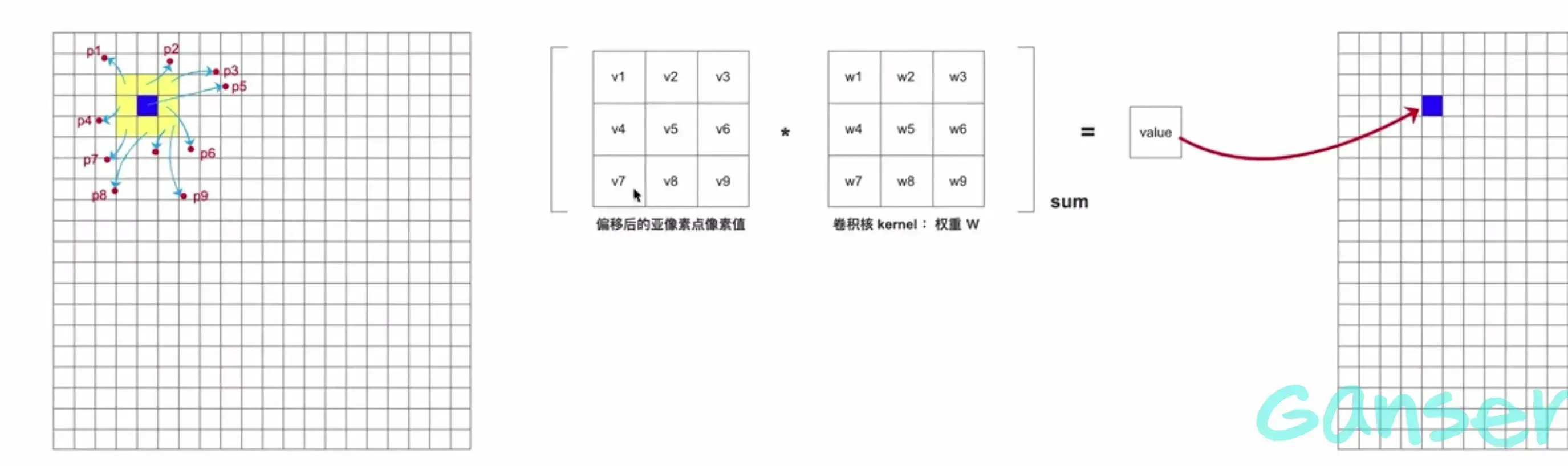
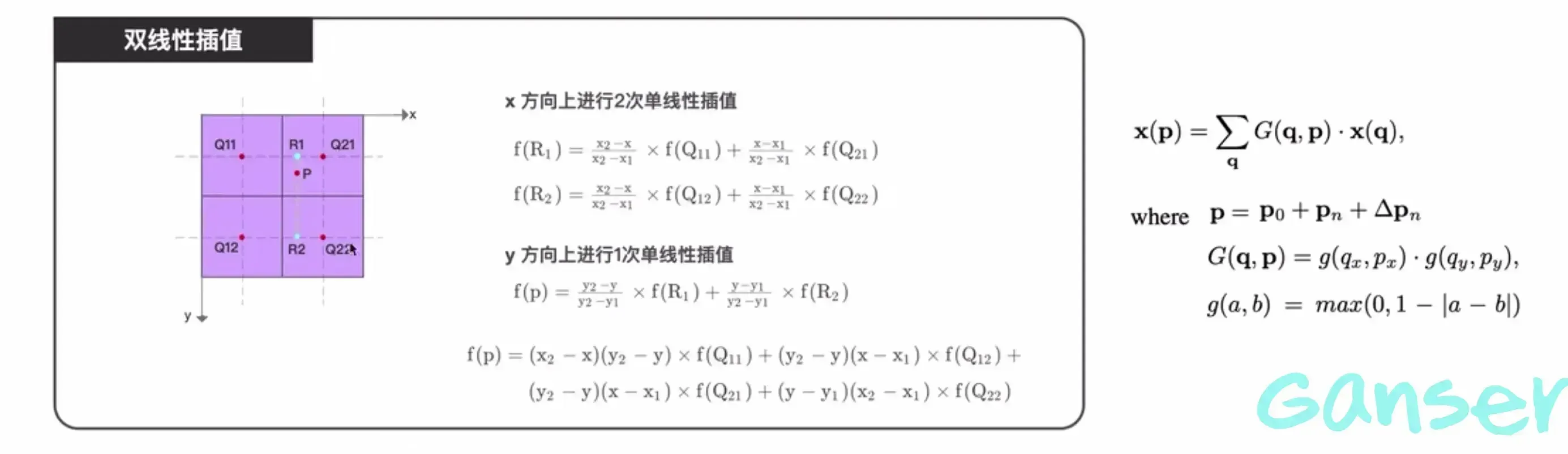
这样可变形卷积的操作就此完成。作者在针对偏移坐标的像素值的求解使用双线性插值法求得。找到亚像素点相邻的4个像素点,用该方法求解目标亚像素点的值。
本内容引用B站Enzo_Mi大佬的视频内容。


本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 GanSer!
相关推荐






评论
匿名评论
✅ 你无需删除空行,直接评论以获取最佳展示效果




